Platform Comparison Test Results
This document presents performance and accuracy comparison test results between PoSDK and current mainstream 3D reconstruction platforms on standard datasets.
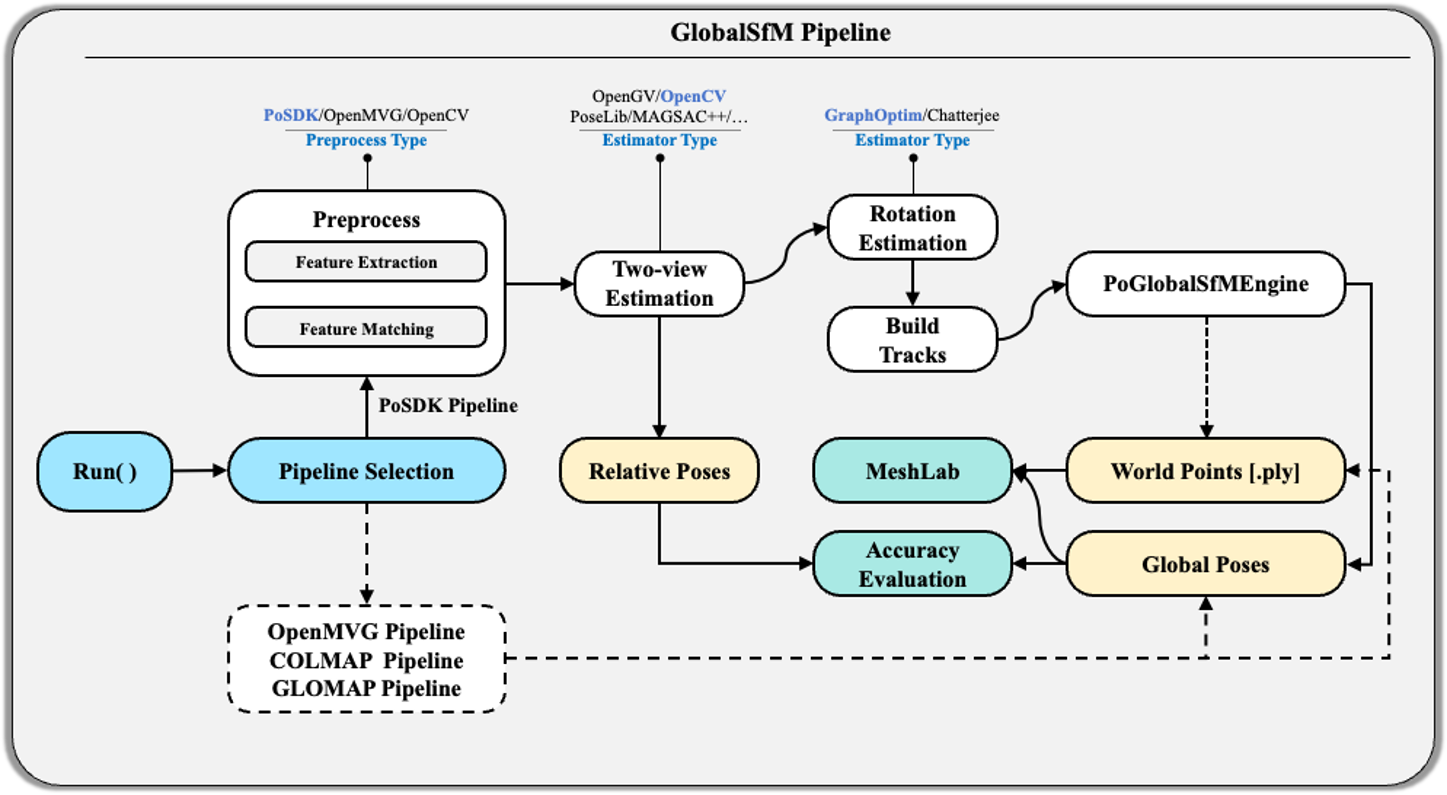
Pose-only platform comparison framework with other platforms
Platform Introduction
PoSDK
Project Homepage: PoSDK Documentation
Repository: https://github.com/pose-only-vision/PoSDK
Technical Features: Efficient pose estimation platform based on pose-only imaging geometry theory
Core Algorithm: GlobalSfM pipeline, supporting multiple preprocessors and algorithm comparison
Configuration Details: See GlobalSfM Pipeline Plugin Configuration
Development Team: Shanghai Jiao Tong University VINF Research Group
License: cc-by-sa-4.0 (Creative Commons Attribution Share Alike 4.0 International)
Tip
PoSDK Runtime Parameter Configuration
PoSDK executes comparison tests through the globalsfm_pipeline plugin with main parameters:
Preprocessing Type:
preprocess_type=posdk(also supports openmvg, opencv)Evaluation Mode:
evaluation_print_mode=comparisonComparison Algorithms:
compared_pipelines=openmvg,COLMAP,GLOMAPPerformance Analysis:
enable_profiling=true
For complete parameter descriptions, refer to Plugin Configuration Documentation.
OpenMVG (Open Multiple View Geometry)
Project Homepage: https://github.com/openMVG/openMVG
Repository: https://github.com/openMVG/openMVG
Technical Features:
Open-source multi-view geometry library
Provides complete SfM (Structure from Motion) solution
Supports both incremental and global reconstruction methods
Development Team: Pierre Moulon and open-source community contributors
License: MPL2 (Mozilla Public License 2.0)
COLMAP
Project Homepage: https://COLMAP.github.io/
Repository: https://github.com/COLMAP/COLMAP
Technical Features:
Industry-leading 3D reconstruction system
Supports incremental SfM, dense reconstruction, and MVS
Provides graphical interface and command-line tools
High-precision pose estimation and point cloud reconstruction
Development Team: Johannes Schönberger, ETH team
License: BSD License
GLOMAP (Global Mapping)
Project Homepage: https://github.com/COLMAP/GLOMAP
Repository: https://github.com/COLMAP/GLOMAP
Technical Features:
Next-generation global SfM system
Focuses on rapid reconstruction of large-scale scenes
Pose estimation method based on global optimization
COLMAP-compatible data format
Development Team: ETH team
License: BSD License
Test Environment
Operating System: Ubuntu 24.04 LTS
Processor: Intel/AMD x86_64
Test Dataset: Strecha standard dataset
fountain-P11 (11 images)
castle-P19/P30 (19/30 images)
entry-P10 (10 images)
Herz-Jesus-P8/P25 (8/25 images)
Sparse Point Cloud Visualization
The following shows sparse point cloud reconstruction result comparisons from different platforms on the Strecha (castle-P30) dataset:
COLMAP |
GLOMAP |
OpenMVG |
PoSDK (Ours) |
Notes:
All point clouds are compared and displayed under the same dataset
Point cloud colors represent RGB information of feature points
GIF animations show point cloud rotation views for easy observation of reconstruction quality
Note
Table data comes from platform test results. In the tables:
Red bold: Best result for the same dataset
Black bold: Second-best result for the same dataset
Total Runtime Comparison
The following table shows total runtime (unit: milliseconds) on different datasets:
| Dataset | PoSDK (ms) | OpenMVG (ms) | COLMAP (ms) | GLOMAP (ms) |
|---|---|---|---|---|
| Herz-Jesus-P25 | 14,434 | 26,549 | 91,958 | 83,249 |
| Herz-Jesus-P8 | 3,639 | 6,671 | 22,313 | 19,540 |
| castle-P19 | 7,278 | 12,011 | 63,818 | 59,280 |
| castle-P30 | 14,688 | 23,790 | 121,657 | 105,849 |
| entry-P10 | 4,187 | 8,727 | 31,482 | 30,002 |
| fountain-P11 | 5,465 | 12,610 | 37,517 | 32,239 |
Accuracy Comparison Results
1. Global Pose Rotation Error
Global pose rotation error statistics (unit: degrees):
| Dataset | Algorithm | Mean | Median | Min | Max | StdDev |
|---|---|---|---|---|---|---|
| Herz-Jesus-P25 | PoSDK | 0.0584 | 0.0508 | 0.0336 | 0.1182 | 0.0227 |
| Herz-Jesus-P25 | COLMAP | 0.0642 | 0.0570 | 0.0299 | 0.1213 | 0.0249 |
| Herz-Jesus-P25 | GLOMAP | 0.0641 | 0.0521 | 0.0329 | 0.1187 | 0.0243 |
| Herz-Jesus-P25 | OpenMVG | 0.0546 | 0.0478 | 0.0329 | 0.1044 | 0.0192 |
| Herz-Jesus-P8 | PoSDK | 0.0194 | 0.0203 | 0.0120 | 0.0261 | 0.0049 |
| Herz-Jesus-P8 | COLMAP | 0.0623 | 0.0621 | 0.0191 | 0.1083 | 0.0298 |
| Herz-Jesus-P8 | GLOMAP | 0.0583 | 0.0573 | 0.0208 | 0.0993 | 0.0268 |
| Herz-Jesus-P8 | OpenMVG | 0.0228 | 0.0244 | 0.0152 | 0.0326 | 0.0060 |
| castle-P19 | PoSDK | 0.0445 | 0.0401 | 0.0102 | 0.0884 | 0.0233 |
| castle-P19 | COLMAP | 0.1609 | 0.1240 | 0.0345 | 0.8518 | 0.1703 |
| castle-P19 | GLOMAP | 0.0473 | 0.0444 | 0.0095 | 0.0960 | 0.0237 |
| castle-P19 | OpenMVG | 0.0695 | 0.0592 | 0.0227 | 0.1486 | 0.0371 |
| castle-P30 | PoSDK | 0.0638 | 0.0598 | 0.0459 | 0.1120 | 0.0142 |
| castle-P30 | COLMAP | 0.1791 | 0.1292 | 0.0816 | 1.5168 | 0.2498 |
| castle-P30 | GLOMAP | 0.0968 | 0.0990 | 0.0485 | 0.1723 | 0.0283 |
| castle-P30 | OpenMVG | 0.0843 | 0.0841 | 0.0530 | 0.1255 | 0.0200 |
| entry-P10 | PoSDK | 0.0244 | 0.0231 | 0.0099 | 0.0461 | 0.0103 |
| entry-P10 | COLMAP | 0.1151 | 0.1172 | 0.0643 | 0.1559 | 0.0256 |
| entry-P10 | GLOMAP | 0.0780 | 0.0865 | 0.0491 | 0.1065 | 0.0181 |
| entry-P10 | OpenMVG | 0.0321 | 0.0309 | 0.0112 | 0.0508 | 0.0125 |
| fountain-P11 | PoSDK | 0.0294 | 0.0271 | 0.0233 | 0.0392 | 0.0056 |
| fountain-P11 | COLMAP | 0.0594 | 0.0646 | 0.0225 | 0.0827 | 0.0178 |
| fountain-P11 | GLOMAP | 0.0587 | 0.0618 | 0.0266 | 0.0788 | 0.0170 |
| fountain-P11 | OpenMVG | 0.0297 | 0.0281 | 0.0221 | 0.0399 | 0.0054 |
2. Global Pose Translation Error
Global pose translation error statistics (unit: normalized distance):
| Dataset | Algorithm | Mean | Median | Min | Max | StdDev |
|---|---|---|---|---|---|---|
| Herz-Jesus-P25 | PoSDK | 0.0053 | 0.0056 | 0.0014 | 0.0126 | 0.0024 |
| Herz-Jesus-P25 | COLMAP | 0.0108 | 0.0112 | 0.0014 | 0.0268 | 0.0057 |
| Herz-Jesus-P25 | GLOMAP | 0.0111 | 0.0117 | 0.0012 | 0.0273 | 0.0059 |
| Herz-Jesus-P25 | OpenMVG | 0.0053 | 0.0059 | 0.0009 | 0.0122 | 0.0024 |
| Herz-Jesus-P8 | PoSDK | 0.0037 | 0.0037 | 0.0016 | 0.0064 | 0.0012 |
| Herz-Jesus-P8 | COLMAP | 0.0043 | 0.0045 | 0.0020 | 0.0060 | 0.0014 |
| Herz-Jesus-P8 | GLOMAP | 0.0042 | 0.0042 | 0.0025 | 0.0061 | 0.0012 |
| Herz-Jesus-P8 | OpenMVG | 0.0038 | 0.0036 | 0.0018 | 0.0067 | 0.0013 |
| castle-P19 | PoSDK | 0.0245 | 0.0195 | 0.0053 | 0.0610 | 0.0148 |
| castle-P19 | COLMAP | 0.1970 | 0.1033 | 0.0570 | 1.3986 | 0.2936 |
| castle-P19 | GLOMAP | 0.0297 | 0.0272 | 0.0040 | 0.0593 | 0.0164 |
| castle-P19 | OpenMVG | 0.0305 | 0.0224 | 0.0132 | 0.0714 | 0.0168 |
| castle-P30 | PoSDK | 0.0213 | 0.0167 | 0.0087 | 0.0684 | 0.0119 |
| castle-P30 | COLMAP | 0.2597 | 0.1424 | 0.0110 | 3.1922 | 0.5519 |
| castle-P30 | GLOMAP | 0.0555 | 0.0565 | 0.0134 | 0.0910 | 0.0212 |
| castle-P30 | OpenMVG | 0.0211 | 0.0197 | 0.0041 | 0.0616 | 0.0109 |
| entry-P10 | PoSDK | 0.0064 | 0.0050 | 0.0038 | 0.0130 | 0.0031 |
| entry-P10 | COLMAP | 0.0304 | 0.0244 | 0.0139 | 0.0541 | 0.0128 |
| entry-P10 | GLOMAP | 0.0207 | 0.0211 | 0.0114 | 0.0294 | 0.0061 |
| entry-P10 | OpenMVG | 0.0063 | 0.0052 | 0.0028 | 0.0126 | 0.0032 |
| fountain-P11 | PoSDK | 0.0025 | 0.0022 | 0.0008 | 0.0041 | 0.0011 |
| fountain-P11 | COLMAP | 0.0042 | 0.0040 | 0.0014 | 0.0071 | 0.0018 |
| fountain-P11 | GLOMAP | 0.0037 | 0.0042 | 0.0011 | 0.0059 | 0.0017 |
| fountain-P11 | OpenMVG | 0.0026 | 0.0023 | 0.0005 | 0.0043 | 0.0012 |
3. Relative Pose Rotation Error
Relative pose rotation error statistics (unit: degrees):
| Dataset | Algorithm | Mean | Median | Min | Max | StdDev |
|---|---|---|---|---|---|---|
| Herz-Jesus-P25 | PoSDK | 0.0529 | 0.0441 | 0.0059 | 0.2656 | 0.0393 |
| Herz-Jesus-P25 | OpenMVG | 0.0524 | 0.0470 | 0.0089 | 0.1928 | 0.0305 |
| Herz-Jesus-P8 | PoSDK | 0.0317 | 0.0273 | 0.0065 | 0.0720 | 0.0177 |
| Herz-Jesus-P8 | OpenMVG | 0.0395 | 0.0353 | 0.0130 | 0.1331 | 0.0259 |
| castle-P19 | PoSDK | 0.1564 | 0.0932 | 0.0092 | 0.8094 | 0.1749 |
| castle-P19 | OpenMVG | 0.1369 | 0.0962 | 0.0296 | 0.6888 | 0.1270 |
| castle-P30 | PoSDK | 0.1740 | 0.1049 | 0.0051 | 1.2164 | 0.1939 |
| castle-P30 | OpenMVG | 0.1832 | 0.1003 | 0.0038 | 2.3068 | 0.2555 |
| entry-P10 | PoSDK | 0.0426 | 0.0332 | 0.0088 | 0.1519 | 0.0323 |
| entry-P10 | OpenMVG | 0.0545 | 0.0398 | 0.0053 | 0.2499 | 0.0476 |
| fountain-P11 | PoSDK | 0.0450 | 0.0425 | 0.0056 | 0.2625 | 0.0404 |
| fountain-P11 | OpenMVG | 0.0502 | 0.0432 | 0.0114 | 0.1244 | 0.0302 |
Dataset Details
Strecha Dataset
The Strecha dataset is a classic multi-view stereo (MVS) evaluation dataset provided by École Polytechnique Fédérale de Lausanne (EPFL), containing:
fountain: Fountain scene with complex geometric structures and rich textures
castle: Castle scene with large viewing angle span and challenging occluded regions
entry: Entry scene of medium scale with rich building details
Herz-Jesus: Church scene with fine architectural details and lighting variations
Each dataset provides:
High-resolution color images
Calibrated camera intrinsic matrices
Ground truth camera poses
Ground truth 3D point clouds (for accuracy evaluation)
References:
Strecha, C., et al. “On Benchmarking Camera Calibration and Multi-View Stereo for High Resolution Imagery.” CVPR 2008.
Moulon, P., et al. “OpenMVG: Open Multiple View Geometry.” ICCV 2013 Workshop.
Cai, Q., et al. “A pose-only solution to visual reconstruction and navigation.” TPAMI 2023.